Robotica innovativa e collaborativa
La robotica come vantaggio competitivo. Aiutiamo i clienti a risolvere carenze di manodopera, aumentare la produttività, migliorare la qualità dei prodotti con applicazioni sostenibili, flessibili e sicure in ottica smart manufacturing.

La robotica come vantaggio competitivo.
Progettiamo ed implementiamo linee e celle robotizzate su specifiche esigenze del committente, utilizzando robot dei più noti brand, in particolare ABB, Kuka, Comau, Omron, Universal Robot.
Agili, versatili e di facile programmazione, i robot industriali sono ormai strumenti di lavoro imprescindibili per automatizzare le fabbriche del futuro. Per questo Carretta collabora con aziende manifatturiere, system integrator, ricercatori, per sviluppare “user experience” e proporre nuove applicazioni robotiche nei processi produttivi.
- Robot con sistema di visione per guida, ispezione, rilevamento difetti, allineamento e misurazione.
- Implementazione cinematiche adatte a diverse esigenze di automazione: scara, delta e antropomorfi.
- Robot con applicativi random bin picking per raccolta oggetti disposti casualmente.
- Applicazioni di robot collaborativi, l’ambiente di produzione smart in cui operatori e cobot lavorano in armonia.
Cobot: robot collaborativi
Il Cobot, abbreviazione di COllaborative e roBOT, è un robot progettato per l’interazione diretta con l’essere umano all’interno di uno spazio di lavoro collaborativo definito. Per flessibilità di utilizzo ed interazione diretta in sicurezza con l’operatore, apre scenari rivoluzionari per la competitività della PMI manifatturiera.
Cobot: che cosa sono e come funzionano
Rispetto ai robot industriali tradizionali, i Cobot sono estremamente compatti e leggeri ma soprattutto progettati per interagire con le persone.
Questo significa ergonomia e funzioni avanzate safety native per un’equipaggiamento robotizzato che non ha bisogno di gabbie di protezione: i cobot rispettano distanze di sicurezza tra loro e tra gli operatori, arrivando a rallentare all’ingresso delle persone nell’area di azione e a immobilizzarsi al minimo contatto. Intervalli e traiettorie di arresto sono programmabili e personalizzabili, garantendo così la versatilità operativa. Altro aspetto caratterizzante per la manifattura evoluta è l’elevata precisione di movimento e di posizionamento raggiunta oggi dai cobot.
Cosa puoi automatizzare? Scoprilo step by step!
In generale un Cobot viene utilizzato con successo per aiutare gli operatori in compiti manuali ripetitivi, monotoni o pericolosi, tasks non basati sulle abilità dell’operatore e che non richiedono particolari decisioni da elaborare.
Tendenzialmente i tasks suggeriti per la robotica collaborativa sono:
- Compiti ripetitivi che non richiedono una forza esercitata dal robot, come prelevamento, posizionamento e deposito di un’oggetto su una superficie.
- Processi eseguiti su pezzi simili tra di loro per dimensione e forma, come oggetti posizionati in modo prestabilito su un tavolo.
- Compiti che richiedono un’interazione con un oggetto fisso.
- Processi basati sul prelievo e sul posizionamento di oggetti sempre nella stessa posizione.
Di seguito una piccola guida step by step per suggerire la predisposizione di un’equipaggiamento collaborativo in ambienti produttivi.
La velocità di esecuzione di un task si avvicina a quella dell’operatore umano.
E’ consigliabile l’implementazione di un robot collaborativo se si cerca un aumento di produttività con più turni o 24h/24h o se si vuole agevolare il lavoratore nelle operazioni ripetitive, sequenziali a basso valore aggiunto.
| Semplice | Complessa |
|---|---|
| Se bassi volumi | Se grandi lotti |
| Se mix elevato | Se velocità di produzione maggiore lavoratori umani (aggravio condizioni rischio) |
| Se velocità di produzione simile a quella dei lavoratori umani |
In genere i collaborativi sono indicati per spazi stretti, con un raggio d’azione del braccio inferiore a 1300 mm e per movimentare carichi utili fino a 16 kg (incluso il peso della pinza a fine braccio).
La loro natura compatta consente di eseguire task in aree con spazi limitati.
| Semplice | Complessa |
|---|---|
| Se payload fino a 10 kg | Se payload da 10 a 35 kg |
| Se sbraccio: 500-900 mm | Se sbraccio: 1300-1600 mm |
| Se più Cobot su unica stazione di lavoro | |
| Se robot collaborativo a due bracci |
I Cobot prediligono pezzi con ingombri e superfici con buona uniformità. Per semplificare l’implementazione è preferibile un’accesso ai pezzi ordinato e ripetibile (solitamente su un piano o un vassoio in modo che il processo sia replicabile senza ricorrere a sofisticata programmazione).
E’ fattibile predisporre i pezzi “a matrice” ordinata (dime di appoggio) configurando il cobot sulla sequenza di prelievo-deposito.
| Semplice | Complessa |
|---|---|
| Se operazioni sequenziali con netta separazione tra operazioni cobot e operazioni operatore | Se sistemi di visione o sensori per identificare e prelevare i pezzi |
| Se vi sono comandi di base come inizio-ciclo e fine-ciclo | Se prelievo casuale da cassone |
| Se dimensioni ed ingombri uniformi | |
| Se presentazione ordinata dei pezzi. |
I Cobot pur essendo progettati per lavorare in sicurezza a fianco dei lavoratori richiedono uno studio preliminare all’implementazione con focus sulle specifiche “applicazioni collaborative’.
Questo perché l’analisi del rischio deve essere effettuata a monte, in fase di progettazione, tenendo conto che ogni applicazione è diversa e a sé stante, con caratteristiche proprie che rendono inefficace un’analisi generica di tutti i robot in tutti i contesti lavorativi.
E’ buona prassi assegnare al robot compiti e sequenze ripetitive, manuali e potenzialmente pericolose per l’incolumità dei lavoratori e dedicare all’operatore tasks che valorizzano le sue competenze ed abilità – come le operazioni di supervisione – .
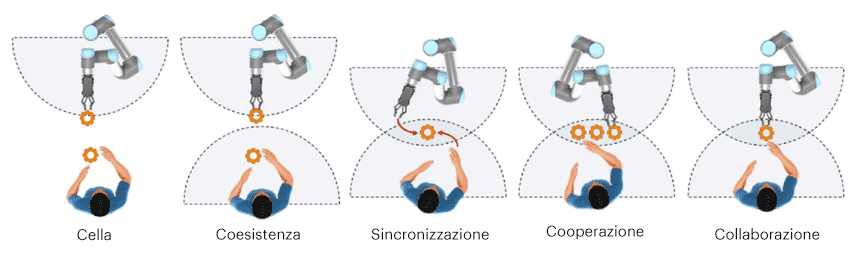
Livelli di impegno tra uomo e robot basati sulla condivisione di tempo e spazio
- L’operatore ed il robot operano in ambienti separati da barriere fisiche (cella).
- L’operatore ed il cobot operano nello stesso ambiente ma non interagiscono tra di loro (coesistenza).
- L’operatore ed il cobot operano nello stesso spazio di lavoro ma alterandosi nell’occuparlo (sincronizzazione)
- L’operatore ed il cobot operano nello stesso spazio di lavoro in contemporanea ma su task diversi (cooperazione)
- L’operatore ed il cobot eseguono il task insieme, le azioni dell’uno si ripercuotono sull’altro (collaborazione).
Di fondamentale importanza considerare il tipo di interazione di cui si necessita:
- robotica collaborativa semplice con operazioni come carico / scarico pezzi, apertura porta, attivazione leve/pulsanti… in questi casi si tratta di interazioni semplici che rientrano oggi nel 90% dei tasks di un cobot;
- robotica collaborativa complessa quando invece si ha una stretta interazione tra robot ed operatore: alternanza di tasks operatore-tasks cobot all’interno di un ciclo di lavoro
| Semplice | Complessa |
|---|---|
| Se operazioni semplice interazione | Se interazione cobot-operatore |
| Se operazioni con stretta interazione uomo-robot | Se collaborazione cobot-operatore |
| Se sincronizzazione cobot-operatore |
L’ organo di presa montato sul braccio robot per interagire con pezzi e macchine è un componente fondamentale.
Qui si spazia da soluzioni di presa robotica standard a grippers e pinze elettro pneumatiche realizzate per svariate esigenze di handling come pinza certificata, pinze a corsa lunga, pinze custom, sistema per il cambio pinza … che possono richiedere anche un’ulteriore revisione-certificazione della sicurezza dell’equipaggiamento.
| Semplice | Complessa |
|---|---|
| Se organi di presa ed utensili standard facilmente disponibili | Se gripper e strumenti di presa specifici |
| Se soluzioni di presa custom per tasks multipli. |
Relativa semplicità si ha con Cobot installati in un’apposito tavolo mobile.
Sequenze di tasks e logistica avanzata possono prevedere collaborativi combinati con sistemi a guida automatica (AGV): in tal caso un robot mobile autonomo, può navigare in modo dinamico utilizzando una mappa, con percorsi pianificati all’interno del layout produttivo.
| Semplice | Complessa |
|---|---|
| Se cobot ancorato ad un tavolo collaborativo | Se combinazione di Cobot a veicoli autoguidati (AGV) |
Per alcune applicazioni sono richiesti cobot con certificazione atti ad essere impiegati in cleanroom ed ambienti sterili. Una attestazione che crea le condizioni necessarie all’utilizzo di questi equipaggiamenti in settori industriali dove gli aspetti relativi all’igiene, alla facilità di pulizia e l’estrema affidabilità sono decisivi, come per esempio nel settore alimentare e delle scienze, oltre che nell’industria medica e farmaceutica.
| Semplice | Complessa |
|---|---|
| Se ambienti cui sono destinati non richiedono standard igienici | Se sono necessari cobot con protezioni da polvere e spruzzi d’acqua |
| Se presenti certificazioni clean room. | Se destinati ad impieghi compatibili per cleanroom |
Le esigenze di programmazione sono direttamente proporzionali al grado di impiego dei sistemi di visione.È attraverso i sistemi di visione con intelligenza artificiale che i Cobot acquisiscono le capacità di “vedere”, “capire” ed “interpretare” necessarie a svolgere i compiti loro assegnati ed interagire con gli operatori umani.
Applicazioni come:
- Riconoscimento
- Orientamento, posizionamento e guida
- Misure non a contatto
- Verifiche
- Classificazione e scelta
- Lettura
- Conteggio
- Sorveglianza ed interazione…
richiedono sistemi dove il fattore cruciale è l’interazione tra potenza dell’hardware (sistemi ottici di rilevazione) e capacità di elaborazione delle informazioni con ricorso ad algoritmi di calcolo, analisi e di matching più o meno sofisticati.
| Semplice | Complessa |
|---|---|
| Se interazione limitata a pochi dispositivi | Se algoritmi random bin picking |
| Se ricorso limitato a sistemi di visione | Se presenza di sensori per il monitoraggio ed il controllo. |
| Se interazione limitata a pochi dispositivi |
I principali utilizzi / applicazioni
I possibili utilizzi dei robot collaborativi sono pressoché illimitati.
Programmazione
L’ultima generazione di robot collaborativi è molto facile da programmare. Spesso sono sufficienti poche ore di introduzione affinché un utente inesperto possa programmare il robot da solo. Il controllo integrato, la visualizzazione user-friendly e la tecnologia affidabile rendono il funzionamento estremamente facile e flessibile.
Un controller integrato con ingressi e uscite digitali e analogiche generalmente rende superfluo l’utilizzo di dispositivi aggiuntivi. Strumenti, valvole, assi ecc. possono essere collegati direttamente al controllo e integrati nel programma. Non sono necessari controlli individuali!

Periodo di ritorno dell’investimento
Grazie all’investimento contenuto e alla semplicità di funzionamento, rispetto ai robot tradizioni i cobot hanno un periodo di ammortamento più breve e un ROI più elevato, rendendoli ideali per le PMI. Possono anche essere adattati rapidamente a nuovi compiti.
Questo è un enorme vantaggio nei tempi odierni con interessanti ricadute in termini di automazione di nuove attività, riconversione a prodotti innovativi, rapido adeguamento della produzione alle richieste del mercato in termini di volume e mix produttivo.
Confronto robot industriale vs collaborativo (cobot)
| Se avete necessità di… | …considerare robot industriale | …considerare robot collaborativo |
|---|---|---|
| Produzione ad alto volume e ad elevata velocità | ||
| Produttività simile a quella di un lavoratore umano | ||
| Carico utile elevato o sbraccio molto lungo, soprattutto ad elevata velocità | ||
| Programmare e riconfigurare il robot internamente | ||
| Riassegnare facilmente il robot a diversi processi / attività | ||
| Precisione estremamente elevata, anche ad elevata velocità | ||
| Modifiche minime al layout di produzione esistente | ||
| Far accedere gli operatori nella cella del robot per completare i compiti | ||
| Opzioni di integrazione con altre macchine e robot | ||
| Eseguire processi con pochi o nessun dipendente | ||
| Automatizzare processi o prodotti che non cambieranno nel tempo | ||
| Basso costo iniziale e ammortamento in meno di un anno | €€€€€ | €€€ |
Il tuo partner integratore di sistema: Carretta
Con decine di sistemi robotici installati siamo in grado di proporre soluzioni pronte all’uso e realizzarne altre ad-hoc per le aziende che vogliono crescere e diventare più competitive.
Nel 2019 con il progetto WIRE COBOTS, finanziato da ESMERA (European SMEs for Robotic Applications H2020-ICT 780265), siamo stati scelti per supportare le PMI dell’UE nel materializzare, testare e promuovere le tecnologie robotiche.
Contattaci senza impegno!
Compila il modulo di contatto con tuoi dati, sarai ricontattato al più presto. I campi contrassegnati con * sono obbligatori.